
 Deutsch
Deutsch English
English1999 /2000
Bilderkennung
https://www.htl-neufelden.at/es/diplomarbeiten/bilderkennung/ 
Jahrgang
Projektpartner
HTL Neufelden
Maturanten
Natschläger
5BAT
Lunglmayr
5BAT
Betreuer
Grömer Herbert
Problemstellung
Es ist ein System zu konstruieren, wo ein Computer mit Hilfe einer Bilderkennung und eines Roboters selbständig gegen eine Person ein Brettspiel spielt.
Funktion
-Selbständiges Finden der eigenen Spielsteine,
-finden der Verdrehung, Position und Größe des Spielfeldes,
-erkennen der Steine des Spielers,
-reagieren auf Züge des Spielers,
-setzen der Spielsteine auf die berechnete Position,
-autonomes Abräumen des Spielfeldes und Spielsteinhandling durch den Roboter.
Aufgaben
-Festlegen des Grundkonzeptes.
-Berechnung und Konstruktion des mechanischen Teils des Roboters.
-Auswahl und Beschaffung der benötigten Komponenten.
-Entwurf der Elektrik und Durchführung der Verkabelung.
-Fertigungsüberwachung in der Werkstätte der HTL.
-Montage der Anlagenteile.
Programmierung der einzelnen Module
Realisierung
Hardware
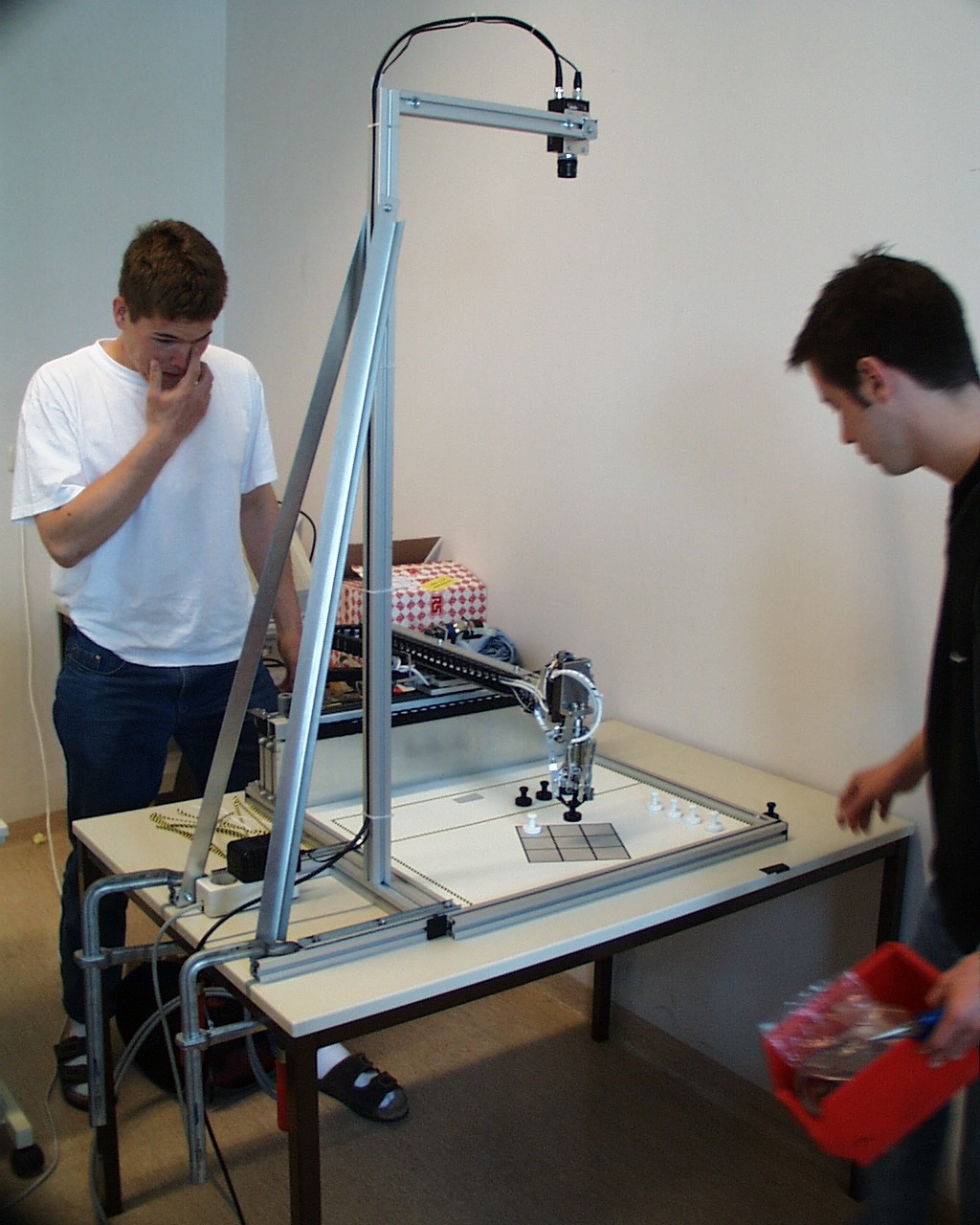
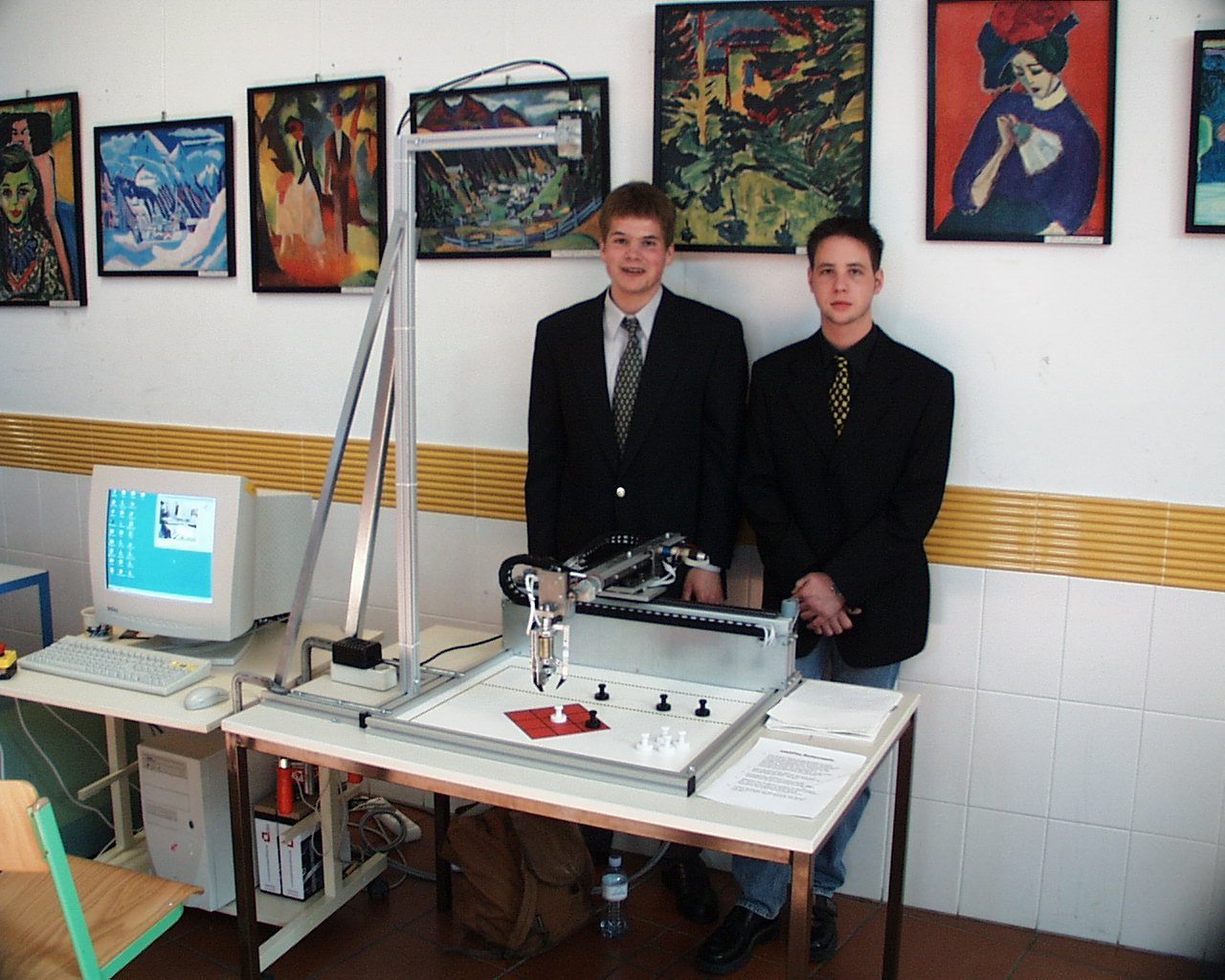
Der Roboter wurde aus 3 Linearachsen aufgebaut, die einen Greifer an die gewünschte Position bewegen. Das Grundgerüst des Roboters wurde aus Aluminium – Leichtprofilen (Kanya) aufgebaut. Diese fassen auch den gesamten Spielbereich des Roboters ein. Die Achsen wurden über Zahnstangen – Ritzel – Kombinationen von Elektromotoren angetrieben. Als Führungen wurden Schienen – Rollen – Kombinationen der Firma Hepco verwendet. Als Greifer kam ein elektrisch angetriebender, in der Schule gefertigter 3 – Punkt – Fingergreifer zum Einsatz. Er wurde von Dr. Zeller eigens nach dem Vorbild der menschlichen Greifmotorik entwickelt.
Software
-Steuerung des Roboters,
-Bilderfassung und Bildhandling,
-Erkennung des Spielverlaufs aus dem Bild,
-Sicherheitsüberwachung durch Erfassung der Hand des Spielers,
-Übernahme des Spielzugs von der eigens für diese Anwendung erstellten Spielsoftware,
-Übergabe der Reaktion des Computers an das Steuerungsmodul,
-Die Software wurde unter Berücksichtigung der einfachen Bedienung und Wartung entwickelt.
Es wurde in allen Projektabschnitten großer Wert auf Flexibilität der gesamten Anlage gelegt. So ist sowohl der Roboter als auch die Software frei änderbar, erweiterbar und für zukünftige Aufgabenstellungen konfigurierbar.



HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden