2020 / 2021
Bausteinsortierung mit kollaborativem Roboter
https://www.htl-neufelden.at/diplomarbeiten/bausteinsortierung-mit-kollaborativem-roboter/ 
Jahrgang
Projektpartner
HTL Neufelden
Maturanten

Schürz Patrick
5BI

Wild Michael
5BI
Betreuer

Grömer Herbert

Bernhard Steffen
Projektbeschreibung
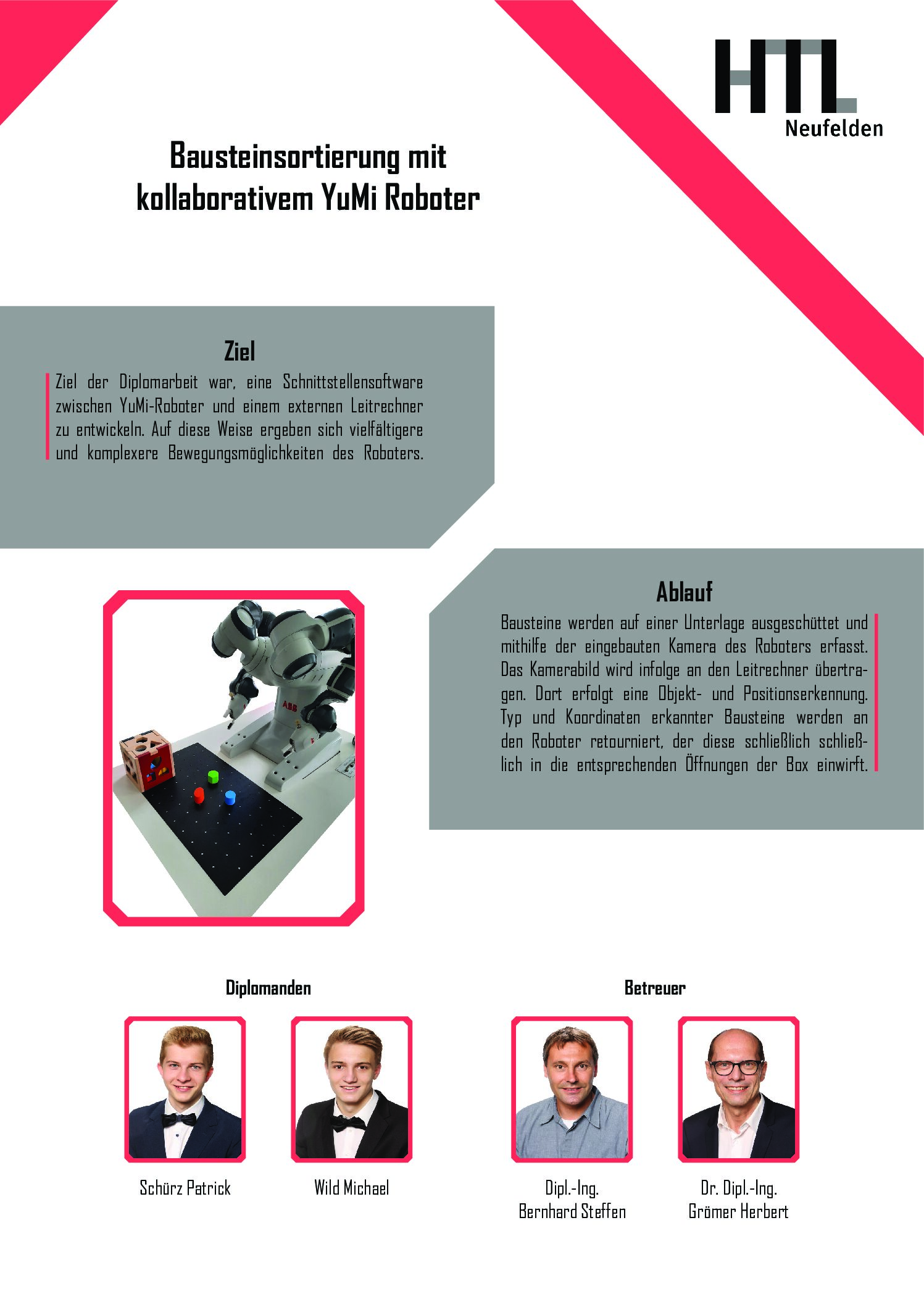
Im Rahmen der Diplomarbeit ist eine Schnittstellensoftware zwischen einem Roboter, in diesem Fall dem YuMi (Kollaborativer Roboter der Fa. ABB), und einem externen Leitrechner zu erstellen. Damit soll der Informationsaustausch zwischen diesen beiden Geräten ermöglicht werden. Roboter und Leitrechner sind mittels Ethernet verbunden.
Zur praktischen Veranschaulichung dient ein Sortiersystem. Daher wird eine Sammelbox mit verschiedenen Öffnungen für unterschiedliche Bausteine in die unmittelbare Nähe des Roboters gestellt. Anschließend werden die Bausteine der Sammelbox auf einer Unterlage, die sich direkt vor dem Roboter befindet, ausgeschüttet.
Nun bewegt der Roboter seine eingebaute Kamera über die Bausteine und nimmt ein Bild auf. Über die Ethernet-Verbindung wird dieses Bild zum Leitrechner gesendet. Anschließend erfolgt eine Objekt- und Positionserkennung. In diesem Schritt werden die Koordinaten und die Orientierung der Bausteine analysiert und ausgewertet.
Die berechneten Werte werden dem Roboter wieder übermittelt. Somit kennt der Roboter die Positionen der Bausteine. Abschließend greift er nacheinander die einzelnen Bausteine und wirft sie in die dafür vorhergesehene Öffnung der Sammelbox.
Projektplakat
HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden