2007 / 2008
Inspektionsroboter
https://www.htl-neufelden.at/diplomarbeiten/inspektionsroboter/ 
Jahrgang
Projektpartner
Röchling Leripa Papertech GesmbH & Co KG
Maturanten
Lauß Thomas
5AAT
Walkolbinger Matthias
5AAT
Lindorfer Simon
5AAT
Oberpeilsteiner Stefan
5AAT
Betreuer
Problemstellung
Die Firma Röchling Leripa Papertech GesmbH & Co KG bietet als Service für ihre Kunden die Wartung von Papiermaschinen, insbesondere die Wartung der keramischen Entwässerungselemente, an.
Für das Serviceteam (ROBAServ) ist es zurzeit aus Platzgründen nicht möglich, an einigen Stellen der Papiermaschinen, die Entwässerungselemente zu inspizieren. Daher wurden wir bzw. die HTL Neufelden beauftragt, für diese Problemstellung eine geeignete Lösung zu finden, sodass ein Service in diesen Bereichen möglich ist.
Zielsetzung
Um die unzugänglichen Abschnitte zu erreichen, soll ein Inspektionsroboter entwickelt werden, der mögliche Schäden von Keramikleisten mit Hilfe einer Kamera erfassen kann. Die Auswertung der Bilder soll online per Laptop erfolgen, welcher die Informationen via WLAN erhält.
Im Speziellen wurden folgende Ziele vereinbart:
• Der Roboter soll per WLAN gesteuert werden und ohne Kabel in die Anlage einfahren können.
(eigene Stromversorgung)
• Schutz gegen Spritzwasser ist unabdingbar.
• Der Wagen soll über eine eigene Lichtquelle verfügen.
• Die Höhe des Fahrzeugs darf höchstens 200 mm betragen.
• Die Elemente können bis zu 30° schräg montiert sein; auch bei dieser Neigung muss der Wagen gegen Abrutschen gesichert sein.
• Die Steuerungssoftware soll möglichst einfach und mit konventionellen Notebooks kompatibel sein.
• Um den Wagen nicht für jede Inspektion neu positionieren zu müssen, muss der Wagen über eine selbsttätige Verstellmöglichkeit der Kamera verfügen.
Projektablauf
• Ermittlung verschiedener Konzepte für den Antrieb/Führung.
• Bau von Prototyp I: Tests zum Fahrverhalten
• 3D Konstruktion von Prototyp II mit Solid Edge
• Zeitgleich: Programmieren des Anwenderprogramms, Mikrocontrollersteuerung, Kommunikation zwischen Mikrocontroller und Laptop.
• Arbeitsvorbereitung und mechanische Fertigung durch die schuleigene Werkstatt.
• Spezielle Kunststoffbearbeitungen wurden von der Firma Röchling Leripa durchgeführt.
• Zusammenbau Prototyp II und Elektroinstallation
• Optimierung der Steuerung
• Dokumentation des gesamten Projekts
Ergebnis
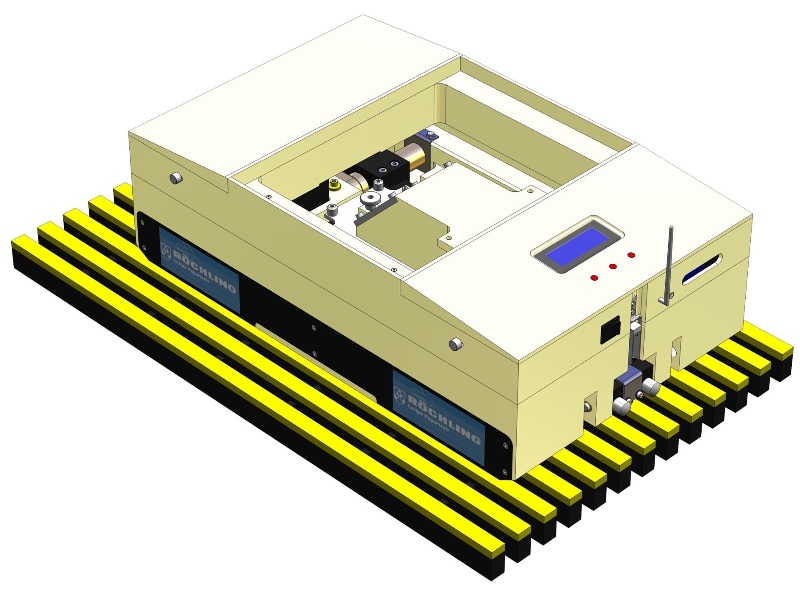
Für diese Aufgabenstellung wurde der Inspektionsroboter ROBASpy entwickelt, dieser kann über WLAN und auch manuell gesteuert werden. Er nimmt mittels einer Kamera die Schäden an den Keramikleisten auf und schickt diese an den Laptop.
Verwertbarkeit
Der Inspektionsroboter wurde für die Firma Röchling Leripa gebaut und wird zur Inspektion von keramischen Entwässerungselementen in Papiermaschinen verwendet.
Systembeschreibung
Für den Einsatz in der Papiermaschine muss zunächst die entsprechende Führungseinrichtung montiert und ggf. eingestellt werden. Der Wagen wird dann auf dem zu untersuchenden Bauteil platziert.
Die Steuerung des weiteren Vorgangs erfolgt über den Laptop.
Der Servicetechniker sieht am PC das Bild, welches von der Kamera aufgenommen und real-time übertragen wird. Im Falle einer Beschädigung hält er die Schadstelle als Fehlerbild fest.
Am Bild werden automatisch die vom Laser gemessene Einfahrposition in die Papiermaschine, sowie andere wichtige Daten abgebildet, wie z.B.: Prüfer, Kunde, Land etc. So kann später bei der Analyse der Bilder die Position des Fehlers lokalisiert werden.
Sollte die Verbindung von Inspektionswagen und Laptop unterbrochen werden, versucht der Mikrocontroller, die Verbindung wiederherzustellen. Gelingt dies nicht, fährt der Wagen automatisch aus der Papiermaschine in die Startposition zurück.
Der Ladezustand des Akkus und der maximale Einfahrweg in die Papiermaschine werden ebenfalls automatisch überprüft.
Ist die Inspektion einer Keramikleiste abgeschlossen, so kann mittels der Zahnriemenachse die Position der Kameraeinheit so verändert werden, dass beim Herausfahren eine weitere Keramikleiste inspiziert werden kann.
Presentation of the problem
The company Röchling Leripa Papertech offers as a service for their customers the maintenance of paper machines, in particular the maintenance of the ceramic draining elements.
At present the service team (ROBAServ) isn´t able to inspect several positions in a machine because of too little height.
Objectives
In order to reach these unapproachable sections an inspection robot should be developed. Pictures taken by an on-board camera should be transmitted by wireless-lan to a laptop, where the technician can detect defective elements.
Special agreements
• The robot should be controlled by WLAN and be able to inspect wirelessly (own power supply).
• Protection against water damage is absolutely vital.
• A light source has to be on-board.
• The height of the vehicle shouldn´t exceed 200 mm.
• The elements can be fixed sloped up to 30°, so the carriage has to be protected from slipping off.
• The controlling software has to be compatible with standard notebooks and easy in usage.
• The vehicle shouldn´t have to be positioned for every single inspection, so it has to have its own adjustment mechanism for the camera.
Project schedule
• Construction of several concepts
Production of prototype I: test of driving behaviour
• 3D construction of prototype II with Solid Edge
• Simultaneously:
Programming of the software application
Microprocessor programming
Communication microprocessor – laptop
• Mechanic production in the school-workshop
Special plastic-processings have been done by Röchling Leripa
• Assembly of prototype II and installation of the electrical system
• Optimization of the controlling system
• Documentation of the project
Result
For these terms of reference the inspection robot ROBASpy has been developed. It can be controlled either by WLAN or manually. The taken pictures of ceramic rails are sent to the laptop where the technician can detect defects.
Usability
The inspection robot was developed for the company Röchling Leripa and it is used to inspect draining elements in paper machines.
Descritpion
For using the robot in a paper machine the technician has to mount the necessary guide unit. Then the vehicle has to be positioned on the underground that has to be inspected.
The controlling of the further process is done by the laptop. The picture is presented to the service technician on the screen. In case of damage he stops the vehicle and saves the picture.
The picture taken contains information on the actual position in the paper machine and other important facts. The saved position allows localizing the damage.
In case of an interruption of the connection between ROBASpy and the laptop, the vehicle tries to reconnect. If this doesn´t work, it drives automatically out of the machine back to the starting position. The level of the batteries and the maximum driving distance is also checked.
If the inspection of one ceramic rail is finished, the position of the camera unit can be adjusted. So another rail can be inspected on the way back.
HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden