1999 / 2000
Scara-Roboter für Schach
https://www.htl-neufelden.at/diplomarbeiten/scara_roboter_fuer_schach-2/ 
Jahrgang
Projektpartner
HTL Neufelden
Maturanten
Jörg Reiter
5BAT
Markus Sailer
5BAT
Betreuer
Grömer Herbert
Leopod Wurm
Zielsetzung:
Die ursprüngliche Aufgabendefinition war für den Laborbetrieb einen SCARA-Roboter zu konstruieren. Der Roboter sollte in Verbindung mir anderen Handling- oder Produktionsgeräten im Labor Manipulationstechnik eingesetzt werden.
Durch den programmtechnischen Zusatz wurde der Roboter zu einem mechanischen Arm umfunktioniert, der über eine Schnittstelle Schachzüge erhält, und diese ausführt.
SCARA steht für „Selective Complience Assembly Robot Arm“ und beschreibt eine Anordnung von drei oder mehreren Achsen, wobei immer mind. eine Achse translatorisch und mind. zwei Achsen rotatorisch ausgeführt werden müssen. Eine solche Anordnung wird als zylindrische Anordnung bezeichnet. Eine andere Bezeichnung für diese Ausführung eines Roboters ist „Roboter mit Horizontalarmanordnung“.
Forderungen
– Umrechnung von karthesischen Koordinaten in Winkelinkrementalschritte des Roboters
– Erfassen der Koordinaten aus dem Schachbrett des Bildschirmes
– Reihenfolgegebung der beiden Spieler
– Automatisches Abfahren von Zügen
– Erkennung des Spielers und des Spielsteines durch Mausklick
Aufgaben des Projektes
– Erstellung eines Grundkonzeptes
– Konstruktion und Auslegung des Roboters
– Programmieren des Hand- und Schachbetriebes
– Überwachung und Kontrolle der Fertigung in der schuleigenen Werkstätte
– Montage der mechanischen Teile
– Verkabelung und Anschluss
– Inbetriebnahme der Maschine
Hardware
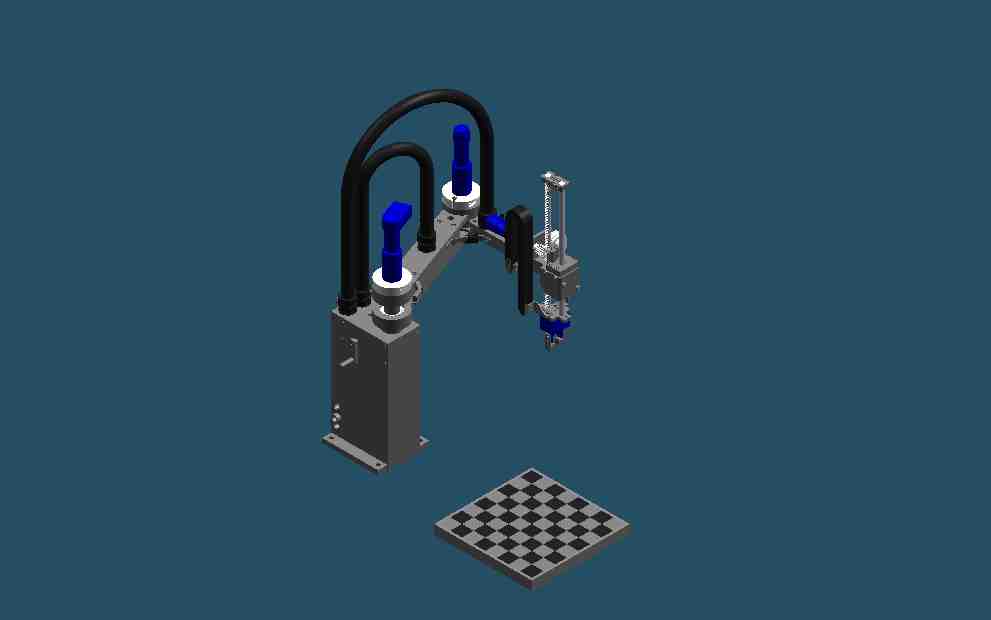
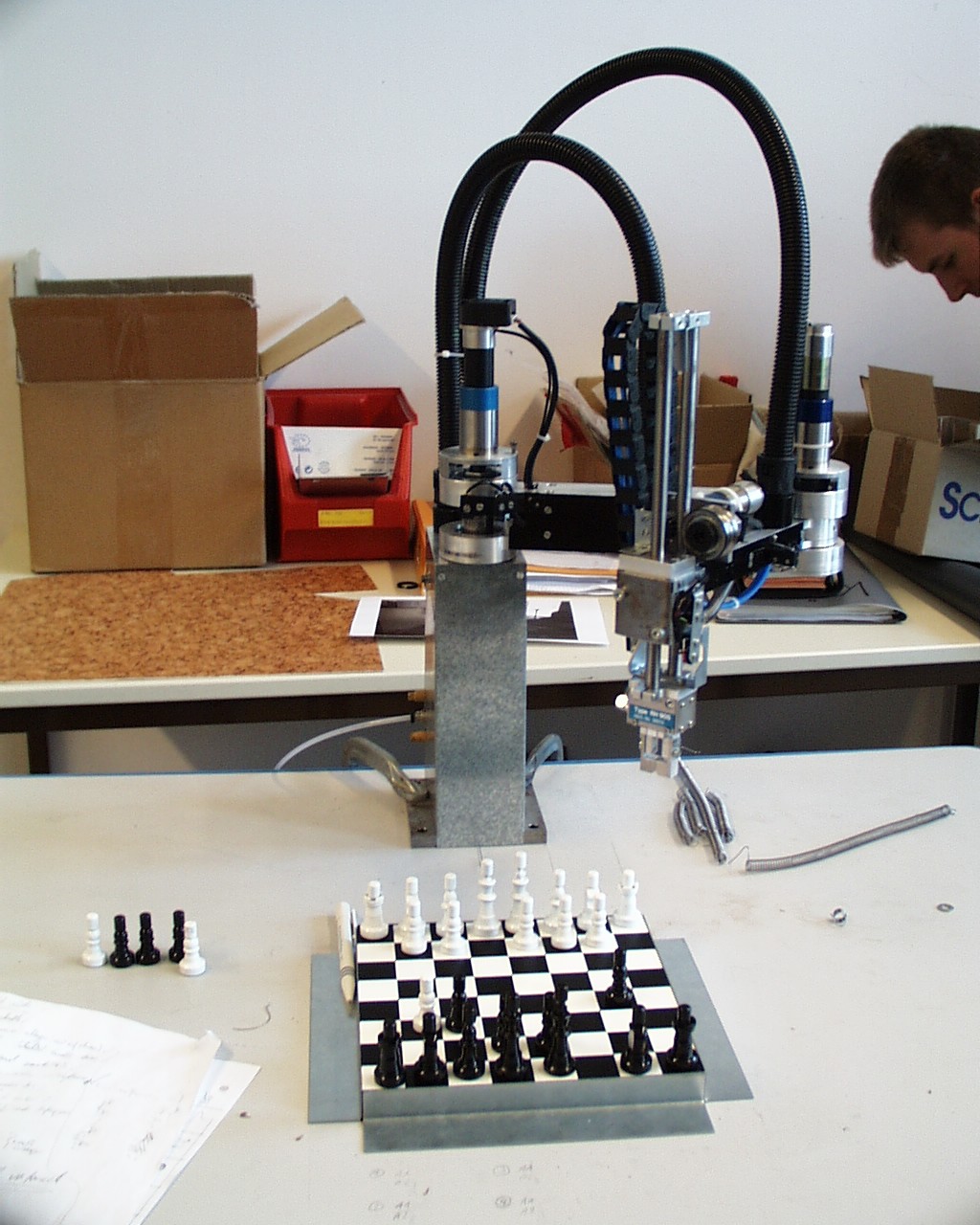
Der Roboter besteht aus zwei Drehachsen und einer Linerachse.
An der am Ende der zweiten Drehachse angeordneten Linearachs ebefindet sich eine Parallelgreifer zum Greifen der Schachfiguren.
Angesteuert werden die drei Achsen über Gleichstrommotoren. Die Linearführung besteht aus einer Ritze-Zahnstange-Kombination. Geführt wird diese mit Linearführungen.
Software
– Steuerung des Roboters
– Koordinatentransformation
– Koordinatenerfassung aus dem Schachprogramm
– Anfahren jedes beliebigen Punktes im Arbeitsbereich
– Spieler, Spilestein und Spielfelderkennung per Mausklick
– Die Software setzt Schachkenntnisse voraus, falsche Züge werden nicht erkannt.
HTL-Neufelden
HTL-Neufelden
Höferweg 47
A-4120 Neufelden
![]()
Tel. 07282-5955
Fax 07282-5955-40
info@htl-neufelden.at
© Copyright - HTL-Neufelden